Design Portfolio
Here is an abbreviated selection of examples of work I have done which has been integrated into saleable products, some select publications I have co-authored, and general projects I've worked on both as part of academic work and in my free time.Formlabs
Products I helped to develop during my time at Formlabs.
Fuse Blast
Worked with a small team to design, prototype, validate, and deliver a fully productized, automated media blaster for SLS additive manufacturing applications. Worked closely with overseas contract manufacturer to move through NPI and into mass production on a very aggressive timeline.
Formlabs Product Page ![]()

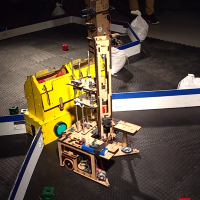
Fuse Depowdering Kit
Worked closely with product design team to rapidly develop and iterate on a workflow for a manual print cleaning and powder reclamation workflow for SLS additive manufacturing, and to create a working prototype to prove usability. End product enabled a $9,000 reduction in base ecosystem price.
Formlabs Product Page ![]()
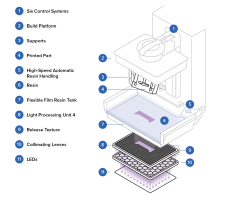
Form 4 Backlight Module
Completed early-stage design and prototype for a compact backlight, which uses a Plano-convex lens array and injection molded light baffle to create a uniform, collimated projection area to expose resin as part of what became Formlabs' Low Force Display™ print engine.
More info ![]()
SLS R&D
Designed and tested early-stage prototypes of a rigid, thermally agnostic, and flat machine structure for use in upcoming SLS systems.
Patents
Patentable work I did which have been filed and granted patent regristry listings.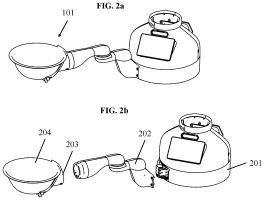
Robotic systems and methods for conveyance of items
(Patent pending, 2020)
Co-invented a 2-DOF, fully revolute ancillary robotic arm which can be stacked underneath a robotic arm and used for the conveyance of items in coordination with the primary robotic arm. This system has since been built and deployed to several customer sites.
USPTO Pub. No. US 2021/0122585 A1 ![]()
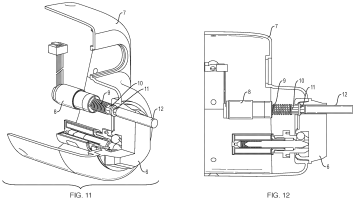
Food-Safe, Washable Interface For Exchanging Tools
(Patent pending, 2019)
Invented a washable, fully electric robotic tool changer which allows Alfred the Robotic Sous Chef to swap between a range of utensils as part of normal kitchen operation. This is now part of the core Alfred product and used every day as part of the core salad assembly routine.
USPTO Pub. No. US 2020/0086503 A1 ![]()
Publications
Published research that I have participated in as an MIT undergraduate.A Simple Electric Soft Robotic Gripper with High-Deformation Haptic Feedback (2018)
Designed and built testing apparatus, ran materials properties tests, and worked to process data to characterize a set of soft robotic actuators which can be operated by traditional rigid motors.
2019 International Conference on Robotics and Automation (ICRA). ![]()
Robot-Assisted Carpentry for Mass Customization (2017)
Created a library of parametric CAD models, ran finite element analysis simulations, wrote code, and prototyped hardware for a set of robots used to demonstrate algorithms for parametrically constructing carpentered furniture.
2018 International Conference on Robotics and Automation (ICRA). ![]()
Dexai Robotics
Some mechanisms and machines I worked on that were incorporated into Alfred, the customizable robotic sous chef. See more here!
Alfred
A customizable drop-in kitchen automation solution that performs food assembly steps. The pictured Alfred is set up for grab and go salads, and the technology is scalable to work with many types of foods.

Pulp Bowl Singulator
Designed, prototyped, and delivered a mechanism which can successfully denest a notoriously tricky type of disposable bowl from a stack. Mechanism has been deployed to multiple customer sites and is in use as part of an end-to-end accessory system for Alfred.
Next-generation end effector and sensor package
Led early-stage to working prototype development of a next-generation sensing and actuating package for Alfred. Specced and integrated multiple new sensors, increased structural rigidity, and increased performance and lifespan of the system.
Mechanical Lidding Tool
Designed, tested, and delivered a robust mechanical gripper attachment for Alfred which allows it to grasp lids and mate them to bowls.
Electrified Head
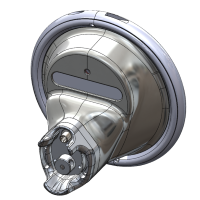
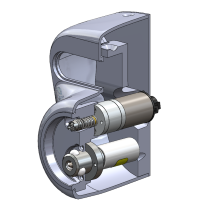
Designed and prototyped a fully electric version of what had previously been a fully pneumatic tool changer and utensil actuating system. Generated patentable ideas (detailed above) and constructed a working prototype as an intern, which was later adapted and implemented into the current product.

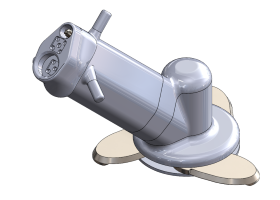
Ancillary Arm
Designed and created the original prototype for a fully revolute 2 DOF arm which allows Alfred to scoop into a bowl while reducing motion time and minimizing spillage. Implemented DFMA improvements on a more mature version of the design to reduce cost and assembly time per unit and increase subsystem lifespan.
MIT Class Projects
Robots designed and built as part of MIT coursework.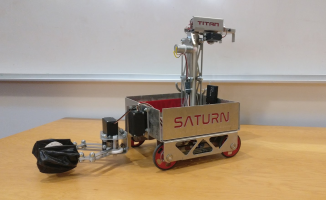
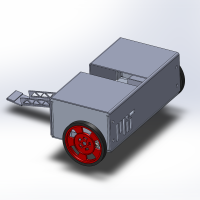
Saturn & Titan (2019)
A pair of robots designed and built as part of MIT's Design and Manufacuring class competition. Built largely using waterjet sheet metal, Saturn is a mobile platform which uses a gripper to place rocks inside of its cavity. Titan is a small, deployable winch which pulls on a cable for a points multiplier.
MASLAB 2017 (2017)
Worked with team to design and build an autonomous, mobile robot to detect, pick up, and stack blocks as part of MIT's winter robotics competition.
Personal projects
Just some stuff I work on for fun and in my personal time.
High Power Rocketry
I have designed and built a number of high-power rockets and flown them to altitudes around 10,000 feet. The pictured rocket was entirely scratchbuilt, including laying up the fiberglass airframe by hand.

Vintage Mechanical Keyboard
I rescued this 1984 IBM Model F keyboard from an E-waste bin at MIT. I have since disassembled it, cleaned it, modded it to use a standard ANSI layout, and installed a USB controller for compatibility with modern PCs. I use this keyboard every day.

Racecar
My 2008 Honda Fit, which I have been gradually modifying with the end goal of entering it in a time attack series race. Features a number of custom-fabbed machined and 3D printed parts.
MIT Rocket Team
Worked with team to build a rocket to fly a 10 lb scientific payload to 70,000 feet and safely recover it.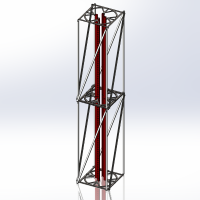
Launch Pad and Test Stand (2018)
Designed and built a testing rig to measure output thrust of large-scale solid rocket motors during static fires, which is also reconfigureable as a launch pad.

Project Raziel (2017)
Designed and built a sabot-based system to deploy a rover from a landed high-powered rocket.
Prototype Rover (2017)
A sheet metal rover prototype to demonstrate a form-factor that would allow deployment from a 6-inch rocket tube.
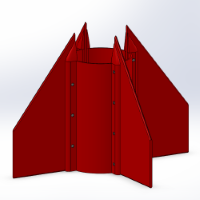
High-Velocity Fin Can (2017)
A fin can for a six-inch rocket meant to endure high heating at mach 2 and above, while minimizing drag in order to facilitate the highest possible flight.
FIRST Robotics Competition
Students are given six weeks to design, build, and program a 120 pound teleoperated machine capable of playing a competetive game in 3v3 matches with other teams.
H.O.W.A.R.D. (2010)
Kicks soccer balls into goals as part of a soccer-themed game.
Best Defender, 2010 Dallas Regional

Machiavelli (2011)
Hangs inner tubes on a rack and deploys a "minibot" that climbs a pole.
Quarterfinalist, 2011 Dallas Regional

Virgilio (2012)
Balances on a teeter-totter with another robot and passes foam basketballs to other robots.

Decapitron (2014)
Catches a 2 foot diameter excercise ball thrown by another robot and deposits it in a goal.

Nom Nom (2015)
Stacks industrial storage crates and recycling containers.
Quarterfinalist, 2015 Hub City Regional

That's so Craven (2016)
Traverses obstacles and places 10" dodgeballs in a goal in a medieval-themed tower defense game.
Winner, 2016 Hub City Regional
FIRST Offseason CAD Excercises

Revamped Logomotion Robot (2015)
Theoretical robot designed to play the 2011 game, done as an excercise in mechanical arm design.
F4 CADathon 2015: Polar Plunder (2015)
Theoretical robot designed to manipulate large objects. Done as an excercise in CAD techniques.